models/yolov8/ #10285
Replies: 73 comments 160 replies
-
|
I can't find score of yolov8x6.pt... |
Beta Was this translation helpful? Give feedback.
-
|
Hey there! 😊 It looks like you're searching for the performance score of the For detailed performance metrics like mAP (mean Average Precision), speed, and other statistics, they are generally available for models in the YOLOv8 series trained on datasets like COCO or Open Images V7, as showcased on the documentation page you've referred to. These metrics include various performance aspects such as mAP values across different image sizes and speeds on different platforms. If from ultralytics import YOLO
# Load your model
model = YOLO('yolov8x6.pt')
# Evaluate the model on validation data to get scores
results = model.val(data='path/to/your/validation/data.yaml')
print(results)But, do keep diving into the Ultralytics YOLO documentation for further insights. And if you have more detailed questions or need further assistance, don't hesitate to reach out! 🌟 |
Beta Was this translation helpful? Give feedback.
-
Beta Was this translation helpful? Give feedback.
-
|
Hey there! 🙌 I'm sorry to hear you're facing issues with accurately counting pants using your YOLOv8 segmentation model. When dealing with non-rigid objects like clothes, their altering shapes and overlaps can indeed pose challenges. Here's a suggestion you might explore:
Here's a simple code snippet to adjust the post-processing thresholds: from ultralytics import YOLO
model = YOLO('yolov8n-seg.pt') # Your trained model
results = model('path/to/your/image.jpg', conf=0.4, iou=0.5)
# Count the unique pants post-processing
pants_count = len(results.masks) # Adjust according to your merging logic
print('Number of pants:', pants_count)Hope these tips help! If you have further details or specific challenges, feel free to share! Good luck with your project. 🍀 |
Beta Was this translation helpful? Give feedback.
-
|
I used yolov8 to successfully detect objects in nuscene camera image dataset for autonomus driving. However, i am finding it dificult to extract or retrieve bounding boxes, classes/labels and confidence scores from the processed images. I will need to use these information (bounding boxes cordinates, confidence scores, labels). I tried using format [xmin, ymin, xmax, ymax] format, and using logic that relies on the 'xyxy' attribute but to no avail. @pderrenger i really need your help as I need to move on to the next task. Thanks |
Beta Was this translation helpful? Give feedback.
-
|
Hi there! 😊 I'm glad to hear that you've found success using YOLOv8 for object detection in the nuscene camera image dataset! To assist you with extracting bounding boxes, class labels, and confidence scores from your detections, here's a straightforward example that might help: from ultralytics import YOLO
# Load your model (official or custom trained)
model = YOLO('path/to/your/model.pt')
# Run inference on an image or images
results = model('path/to/your/image.jpg')
# Iterate over results to extract information
for result in results:
# Get bounding boxes in [xmin, ymin, xmax, ymax] format
boxes = result.boxes.xyxy.cpu().numpy()
# Get class labels
labels = [model.names[int(cls)] for cls in result.boxes.cls]
# Get confidence scores
confidences = result.boxes.conf.cpu().numpy()
# Example: print results for each detected object
for box, label, confidence in zip(boxes, labels, confidences):
print(f"Box: {box}, Label: {label}, Confidence: {confidence}")This example assumes you're working with a single image. If you're processing multiple images, the Remember, Let me know if this helps or if you have any more questions! Happy coding! 🚀 |
Beta Was this translation helpful? Give feedback.
-
|
Hello, thank you for your help. Working now. |
Beta Was this translation helpful? Give feedback.
-
|
Hey! 🎉 I'm thrilled to hear things are working out for you now. If you ever need further assistance or have more questions along the way, don't hesitate to reach out. Remember, the Ultralytics team and the YOLOv8 community are here to help. Happy detecting! |
Beta Was this translation helpful? Give feedback.
-
|
HI! |
Beta Was this translation helpful? Give feedback.
-
|
Hey there! 👋 To get the testing accuracy and classification reports like F1 score, precision, recall, and confusion matrix, you can first predict on your test dataset using the Here's a quick snippet on how you could approach it: from ultralytics import YOLO
from sklearn.metrics import classification_report, confusion_matrix
# Load your trained model
model = YOLO('path/to/your/model.pt')
# Predict on your test dataset. Assuming `test_images` is a list of your test image paths
predictions = model.predict(test_images)
# Assuming `true_labels` is a list of your true labels for the test set
predicted_labels = [pred[0].pred.argmax(-1).cpu().numpy() for pred in predictions] # Get most likely class
# Now use sklearn to get the classification report and confusion matrix
print(classification_report(true_labels, predicted_labels))
print(confusion_matrix(true_labels, predicted_labels))Make sure to adjust Hope this helps! If you have further questions, feel free to ask. 😊 |
Beta Was this translation helpful? Give feedback.
-
|
Does YOLOV8 have any inherent object tracking across images? |
Beta Was this translation helpful? Give feedback.
-
|
Hi there! YOLOv8 itself is primarily built for object detection and doesn't inherently support object tracking across images. For tracking, you'd likely need to integrate YOLOv8 with a tracking algorithm like SORT or DeepSORT. If you're interested in exploring object tracking with YOLO models, you might consider using YOLOv8 in combination with other tracking libraries to set up the tracking pipeline. Here’s a basic example using Python: from ultralytics import YOLO
import cv2
# Initialize YOLOv8
model = YOLO('yolov8n.pt')
# Load your video
cap = cv2.VideoCapture('path_to_video.mp4')
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
# Detect objects in the frame
results = model(frame)
# Apply your tracking logic here
# This part would typically involve integrating with a tracking algorithm
# to track detected objects across frames
# Display results
results.show()
cap.release()
cv2.destroyAllWindows()This snippet shows how you can perform detection on each frame. For tracking, you’ll have to integrate the results with a tracking algorithm. Hope this helps! 😊 |
Beta Was this translation helpful? Give feedback.
-
|
Have an issues with class loading and labels. |
Beta Was this translation helpful? Give feedback.
-
|
Hi there! It sounds like you're having some trouble with dataset configuration for your YOLOv8n model. For YOLO models, you need to ensure that your dataset configuration file ( train: ./data/train/images
val: ./data/val/images
test: ./data/test/images
nc: number_of_classes # specify the number of classes here
names: ['class1', 'class2', ...] # list all class names hereMake sure the paths in your For handling a second dataset for validation, you can specify this under the Here’s a quick example to modify paths if you have a separate validation dataset: train: path/to/your/train/images
val: path/to/your/validation/imagesMake sure your labels are stored in the same directory structure as your images and are correctly linked in your annotation files. If you've configured everything correctly and the issue persists, double-check the format of your label files to ensure they match what YOLO expects. 😊 |
Beta Was this translation helpful? Give feedback.
-
|
from ultralytics import YOLO model = YOLO("best.pt") Hi, I have to export model into tflite format but the error I'm getting is as given below. TensorFlow SavedModel: export failure ❌ 19.1s: generic_type: cannot initialize type "StatusCode": an object with that name is already definedImportError Traceback (most recent call last) 11 frames ImportError: generic_type: cannot initialize type "StatusCode": an object with that name is already defined. Please give suggestion on this. |
Beta Was this translation helpful? Give feedback.
-
|
Hi there! It looks like you're encountering an Here are a couple of steps you can try to resolve this issue:
If these steps don't resolve the issue, please provide more details about your environment (OS, Python version, TensorFlow version), and I'll be happy to help further! 😊 |
Beta Was this translation helpful? Give feedback.
-
|
from ultralytics import YOLO model = YOLO("best.pt") Hi, I have to export model into tflite format but the error I'm getting is as given below. TensorFlow SavedModel: export failure ❌ 19.1s: generic_type: cannot initialize type "StatusCode": an object with that name is already definedImportError Traceback (most recent call last) 11 frames ImportError: generic_type: cannot initialize type "StatusCode": an object with that name is already defined. Please give suggestion on this. |
Beta Was this translation helpful? Give feedback.
-
|
Hi there! It looks like you're encountering an Here are a couple of steps you can try to resolve this issue:
After setting up a clean environment and ensuring the correct installations, try exporting the model again. If the problem persists, please provide more details about your setup (like TensorFlow version and system details), and I'll be happy to help further! For more detailed guidance on exporting YOLOv8 models to TFLite, you can also check out our TFLite integration guide. 😊 |
Beta Was this translation helpful? Give feedback.
-
|
Yes I have install necessary packages only. And I'm training this model on google collab so it is clear environment only. Help me with this. |
Beta Was this translation helpful? Give feedback.
-
|
Hello! Thanks for reaching out and providing details about your setup on Google Colab. It seems like the issue might be related to specific TensorFlow or TensorFlow Lite versions installed in your Colab environment. Here's a quick suggestion to try:
!pip install --upgrade tensorflow
from ultralytics import YOLO
model = YOLO("best.pt")
model.export(format='tflite')If the issue persists, it could be helpful to check for any specific TensorFlow Lite dependencies or version conflicts. Sometimes, a fresh runtime (use 'Runtime' -> 'Restart runtime' in Colab) can also help clear up environment issues. Let me know if this helps or if you're still facing problems! 😊 |
Beta Was this translation helpful? Give feedback.
-
|
is it possible to convert a dataset for yolov8 detection into yolov8-cls ? |
Beta Was this translation helpful? Give feedback.
-
|
Yes, you can convert a dataset from YOLOv8 detection format to YOLOv8-cls (classification) format, but it requires some adjustments since these tasks handle data differently. Detection models require bounding boxes, while classification models need only class labels for the whole image. Here’s a basic approach:
This process involves scripting to adjust your dataset format accordingly. Here's a quick Python snippet to illustrate converting a single annotation: # Example of converting detection annotation to classification
detection_label = [0, 0.5, 0.5, 0.4, 0.4] # [class, x_center, y_center, width, height]
classification_label = [detection_label[0]] # Keep only the class
# Save the new label to a file or use it as needed
print("Classification label:", classification_label)For a full dataset conversion, you'd iterate over all annotations and adjust them similarly. If you need further assistance or a more detailed guide, feel free to ask! 😊 |
Beta Was this translation helpful? Give feedback.
-
|
Hi! |
Beta Was this translation helpful? Give feedback.
-
|
@Mahyar426 hi! To ensure your trained YOLOv8 models retain their custom classes when loading them for inference, you need to save both the model weights and the associated configuration file. Here’s a step-by-step guide:
This approach ensures that the model retains the custom classes and configurations used during training. For more detailed information, you can refer to the Ultralytics documentation. Happy coding! 🚀 |
Beta Was this translation helpful? Give feedback.
-
|
Hi! I am currently involved in developing a vehicle detection system, with a particular focus on determining whether vehicles are parked or in motion through pixel speed estimation. I have been experimenting with the speed_estimator function, in terms of both kilometers per hour and pixels per frame, but so far, I have not achieved satisfactory results. Could any of you suggest advanced methodologies or configuration adjustments that could improve the accuracy of the detection? Any recommendations on libraries, algorithms, or alternative approaches would also be greatly appreciated. I thank you in advance for any guidance or advice you can provide. Best regards. |
Beta Was this translation helpful? Give feedback.
-
|
Hello, Thank you for reaching out with your query on vehicle detection and speed estimation using the
For libraries, aside from OpenCV, you might look into PyTorch and TensorFlow for implementing and training any deep learning models. Both frameworks support the advanced techniques mentioned above and are compatible with YOLOv8. I hope these suggestions help you enhance your vehicle detection system. If you have further questions or need more detailed assistance, feel free to ask. |
Beta Was this translation helpful? Give feedback.
-
|
Muchas gracias!
def plot_box_and_track(self, track_id, box, cls, track):
"""Plots track and bounding box."""
speed = self.dist_data.get(track_id, 0)
status_label = "Stopped" if speed < 1 else f"Moving at {speed:.2f}
px/frame" # rango de confianza
bbox_color = (0, 255, 0) if speed < 1 else (0, 0, 255)
# Draw bounding box
cv2.rectangle(self.im0, (int(box[0]), int(box[1])), (int(box[2]),
int(box[3])), bbox_color, 2)
cv2.putText(self.im0, status_label, (int(box[0]), int(box[1]) - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.9, bbox_color, 2)
cv2.polylines(self.im0, [self.trk_pts], isClosed=False, color=
bbox_color, thickness=1)
cv2.circle(self.im0, (int(track[-1][0]), int(track[-1][1])), 5,
bbox_color, -1)
print(f"Plotted bounding box at ({box[0]}, {box[1]}, {box[2]}, {box[
3]}) with label '{status_label}'")
def calculate_speed(self, trk_id, track):
"""Calculates the speed of an object in pixels per frame."""
if len(track) < 2:
self.dist_data[trk_id] = 0
return
previous_point = track[-2]
current_point = track[-1]
distance = np.sqrt((current_point[0] - previous_point[0]) ** 2 + (
current_point[1] - previous_point[1]) ** 2)
self.dist_data[trk_id] = distance
This was the modification I made and it works quite well. Now I'm having
problems when vehicles start moving away from the camera, then the bounding
boxes get smaller and start determining that the vehicle is not moving. I'm
working in it
Thank you very much for taking the time and responding, I am really
fascinated with everything you are doing, incredible. I like it a lot,
thank you
El lun, 3 jun 2024 a la(s) 4:22 p.m., Glenn Jocher ***@***.***)
escribió:
… Hello,
Thank you for reaching out with your query on vehicle detection and speed
estimation using the speed_estimator function. To enhance the accuracy of
your system, you might consider a few advanced methodologies and
adjustments:
1.
*Model Fine-tuning:* If you haven't already, fine-tuning your YOLOv8
model on a dataset specifically annotated with vehicle speeds and states
(parked or in motion) could significantly improve detection accuracy.
2.
*Optical Flow Techniques:* For estimating pixel speed, optical flow
methods can be very effective. Libraries like OpenCV offer functions like
calcOpticalFlowFarneback, which might provide more precise speed
estimations.
3.
*Data Augmentation:* Incorporating variations in vehicle speeds and
lighting conditions during training can help the model generalize better
over different real-world scenarios.
4.
*Temporal Models:* Consider using LSTM networks or 3D ConvNets that
can leverage temporal information across frames to better estimate speeds
and detect motion.
5.
*Ensemble Methods:* Combining predictions from multiple models or
different configurations of the same model can sometimes yield better
results.
For libraries, aside from OpenCV, you might look into PyTorch and
TensorFlow for implementing and training any deep learning models. Both
frameworks support the advanced techniques mentioned above and are
compatible with YOLOv8.
I hope these suggestions help you enhance your vehicle detection system.
If you have further questions or need more detailed assistance, feel free
to ask.
—
Reply to this email directly, view it on GitHub
<#10285 (reply in thread)>,
or unsubscribe
<https://github.com/notifications/unsubscribe-auth/A7E5FJOWIKZXFJUAIH6VF2LZFTGA3AVCNFSM6AAAAABGWINEX6VHI2DSMVQWIX3LMV43SRDJONRXK43TNFXW4Q3PNVWWK3TUHM4TMNJTHEZDA>
.
You are receiving this because you commented.Message ID:
***@***.***
com>
|
Beta Was this translation helpful? Give feedback.
-
|
¡Hola! Gracias por compartir tus modificaciones y por tus amables palabras. 😊 En cuanto al problema que mencionas con los vehículos que se alejan de la cámara, una posible solución podría ser ajustar la escala de los bounding boxes en función de la profundidad estimada o la perspectiva. Esto podría ayudar a mantener la consistencia del tamaño de los bounding boxes a medida que los vehículos se mueven. Otra opción sería implementar un filtro de seguimiento más robusto que pueda adaptarse a cambios rápidos en el tamaño y la posición de los objetos, como un filtro de Kalman, que es común en aplicaciones de seguimiento. Espero que estas sugerencias te sean útiles. ¡Sigue experimentando y no dudes en preguntar si necesitas más ayuda! 🚀 — |
Beta Was this translation helpful? Give feedback.
-
|
Muchisimas gracias la verdad tengo un millon de dudas, si me dices que te
puedo preguntar te puedo dar un listado de preguntas enorme, es broma!
De verdad que estoy gratamente sorprendido por la comunidad, la atención,
la documentación, muy interesante todo, y la verdad que muy agradecido,
tienes un entusiasta en potencia con todo el mundo del computer vision,
gracias a ustedes!
En estos momentos estoy trabajando como te comente principalmente, en la
detección de colisiones (aun me falta por mejorar, pero va bastante bien),
vehiculos en excesos de velocidad, la detección de la senda peatonal
crosswalk, esto me va a servir para detectar las infracciones, me
gustaría empezar a trabajar cuando los vehículos se pasen un semáforo en
rojo.
bueno como te decía muchas dudas, pero esas son las principales donde estoy
trabajando y donde quiero empezar a trabajar! cualquier ayuda, tips, alguna
función que me pueda servir, o cualquier cosa con la que me pueda guiar,
estaré muy atento y más que agradecido.
Estoy abierto también a cualquier colaboración, o algo que pueda aportar,
por mi experiencia pues no será mucho, pero bueno, las ganas son enormes!
Saludos!
__
Roberto Schaefer
…__
El mar, 4 jun 2024 a la(s) 9:58 a.m., Glenn Jocher ***@***.***)
escribió:
¡Hola! Gracias por compartir tus modificaciones y por tus amables
palabras. 😊
En cuanto al problema que mencionas con los vehículos que se alejan de la
cámara, una posible solución podría ser ajustar la escala de los bounding
boxes en función de la profundidad estimada o la perspectiva. Esto podría
ayudar a mantener la consistencia del tamaño de los bounding boxes a medida
que los vehículos se mueven.
Otra opción sería implementar un filtro de seguimiento más robusto que
pueda adaptarse a cambios rápidos en el tamaño y la posición de los
objetos, como un filtro de Kalman, que es común en aplicaciones de
seguimiento.
Espero que estas sugerencias te sean útiles. ¡Sigue experimentando y no
dudes en preguntar si necesitas más ayuda! 🚀
—
Glenn Jocher
—
Reply to this email directly, view it on GitHub
<#10285 (reply in thread)>,
or unsubscribe
<https://github.com/notifications/unsubscribe-auth/A7E5FJLN5VEELLOELI445RLZFXBYFAVCNFSM6AAAAABGWINEX6VHI2DSMVQWIX3LMV43SRDJONRXK43TNFXW4Q3PNVWWK3TUHM4TMNRVGM2TG>
.
You are receiving this because you commented.Message ID:
***@***.***
com>
|
Beta Was this translation helpful? Give feedback.
-
|
@roscha10 ¡Hola Roberto! Muchas gracias por tus amables palabras y por compartir tu entusiasmo por la visión por computadora. Es genial escuchar sobre tus proyectos en detección de colisiones y otras aplicaciones de tráfico. 🚗💡 Para tus proyectos actuales y futuros, te recomendaría explorar las capacidades de seguimiento y detección de YOLOv8, que pueden ser muy útiles para detectar infracciones como el paso de semáforos en rojo. Además, el uso de filtros como Kalman, mencionado por Glenn, puede mejorar la precisión en la detección de objetos en movimiento. Si tienes preguntas específicas o necesitas consejos sobre funciones específicas, no dudes en preguntar. La comunidad está aquí para ayudarte. También, cualquier contribución o idea que quieras compartir será bienvenida; las ganas y el entusiasmo son tan importantes como la experiencia. ¡Saludos y éxito en tus proyectos! |
Beta Was this translation helpful? Give feedback.
-
|
¡Muy interesante lo que dices!
Si tienes algo que me puedas compartir en cuanto a la detección de
semáforos en rojo, sería genial, y he estado estudiando Kalman para mejorar
la precisión en cuanto a la detección! cualquier documentacion especifica
puede ser muy util para mi! estoy buscando seguir aprendiendo
El mié, 5 jun 2024 a la(s) 12:49 a.m., Glenn Jocher (
***@***.***) escribió:
… @roscha10 <https://github.com/roscha10> ¡Hola Roberto!
Muchas gracias por tus amables palabras y por compartir tu entusiasmo por
la visión por computadora. Es genial escuchar sobre tus proyectos en
detección de colisiones y otras aplicaciones de tráfico. 🚗💡
Para tus proyectos actuales y futuros, te recomendaría explorar las
capacidades de seguimiento y detección de YOLOv8, que pueden ser muy útiles
para detectar infracciones como el paso de semáforos en rojo. Además, el
uso de filtros como Kalman, mencionado por Glenn, puede mejorar la
precisión en la detección de objetos en movimiento.
Si tienes preguntas específicas o necesitas consejos sobre funciones
específicas, no dudes en preguntar. La comunidad está aquí para ayudarte.
También, cualquier contribución o idea que quieras compartir será
bienvenida; las ganas y el entusiasmo son tan importantes como la
experiencia.
¡Saludos y éxito en tus proyectos!
—
Reply to this email directly, view it on GitHub
<#10285 (reply in thread)>,
or unsubscribe
<https://github.com/notifications/unsubscribe-auth/A7E5FJJFIANACWM4GE6MMZDZF2KG5AVCNFSM6AAAAABGWINEX6VHI2DSMVQWIX3LMV43SRDJONRXK43TNFXW4Q3PNVWWK3TUHM4TMNZSHEYTI>
.
You are receiving this because you were mentioned.Message ID:
***@***.***
com>
|
Beta Was this translation helpful? Give feedback.
-
|
@roscha10 ¡Hola Roberto! Para la detección de semáforos en rojo, te recomiendo utilizar YOLOv8 con entrenamiento específico para reconocer semáforos en diferentes estados. Puedes entrenar un modelo personalizado con imágenes de semáforos en rojo para mejorar la precisión en este tipo de detección. En cuanto al filtro de Kalman, es excelente para mejorar la precisión en la detección de objetos en movimiento, especialmente en aplicaciones de seguimiento en tiempo real. Aunque no tenemos documentación específica sobre la integración de Kalman con YOLOv8, puedes encontrar recursos generales sobre filtros de Kalman y su aplicación en sistemas de visión por computadora que podrían ser útiles. Si tienes más preguntas o necesitas ayuda con tu proyecto, no dudes en preguntar. ¡Éxito en tus estudios y proyectos! Saludos, |
Beta Was this translation helpful? Give feedback.
-
|
Hello, I use the yolov8n, yolov8s, yolov8m models to identify thermal people, but when I train, when the results of the above 3 models come out, the yolov8n model has Precision=0.8645568 while yolov8s only has 0.8404626 and yolov8m only has there are 0.7639084. |
Beta Was this translation helpful? Give feedback.
-
|
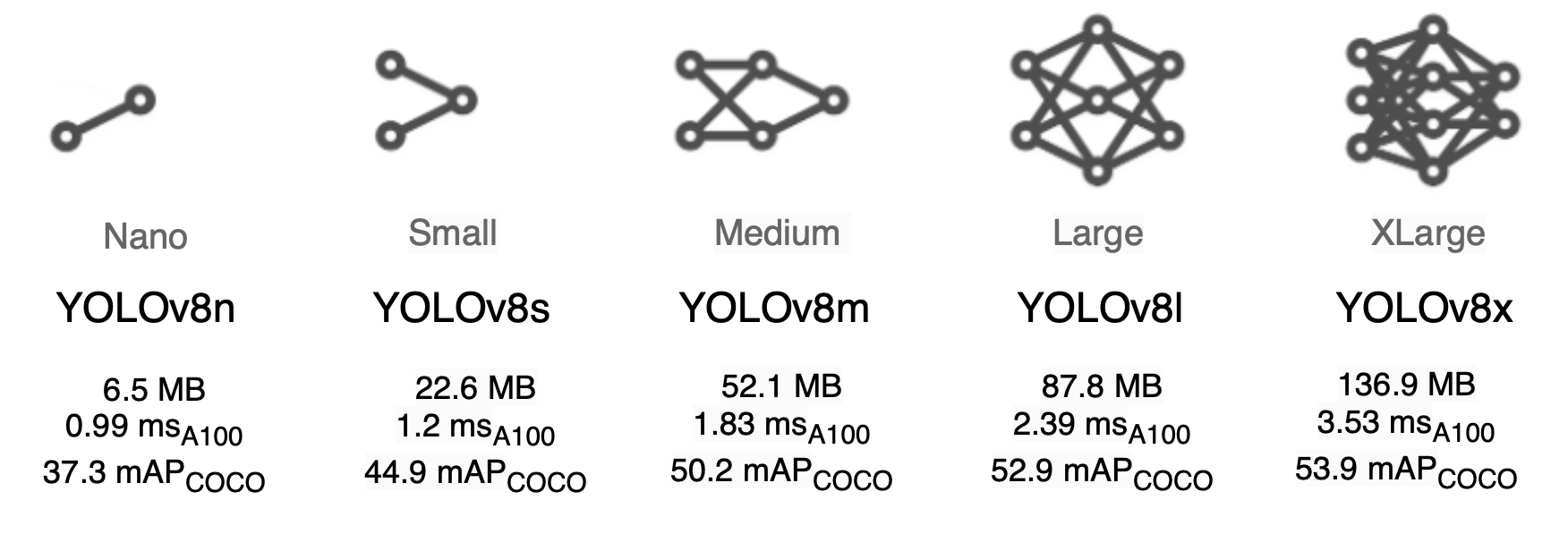
hi, do you have architectural images of the 3 YOLOv8 models n, s, m? I need some pictures of the architecture of these 3 models, do you have them? Thanks |
Beta Was this translation helpful? Give feedback.
-
|
@songucci1 hello! Thank you for your interest in the YOLOv8 models. Currently, we don't have specific architectural images for the YOLOv8n, YOLOv8s, and YOLOv8m models directly available. However, you can explore the detailed architecture and layer configurations by loading the models and inspecting them using the Here's a quick example of how you can do this in Python: from ultralytics import YOLO
# Load the YOLOv8n model
model_n = YOLO("yolov8n.pt")
model_n.info()
# Load the YOLOv8s model
model_s = YOLO("yolov8s.pt")
model_s.info()
# Load the YOLOv8m model
model_m = YOLO("yolov8m.pt")
model_m.info()This will provide you with a detailed summary of each model's architecture, including the layers and parameters. For more information on the YOLOv8 models and their capabilities, you can refer to the YOLOv8 documentation. If you have any further questions or need additional assistance, feel free to ask! 🚀 |
Beta Was this translation helpful? Give feedback.
-
|
hello, can you tell me the difference when training 30 images, 300 images and 3000 images. If there is a difference, what is that difference? Thanks |
Beta Was this translation helpful? Give feedback.
-
It depends on the task and the dataset, but in general a larger data set can help you generalize better: the more (quality) images you have relative to the number of classes, better performance you get from your model. |
Beta Was this translation helpful? Give feedback.
-
|
Hello! The number of images used for training can significantly impact the performance of your model. Here's a brief overview of the differences you might observe when training with 30, 300, and 3000 images: Training with 30 Images
Training with 300 Images
Training with 3000 Images
SummaryIn general, the more (quality) images you have relative to the number of classes, the better performance you can expect from your model. Larger datasets help the model generalize better and improve its accuracy and robustness. If you have any further questions or need additional assistance, feel free to ask! 🚀 For more detailed information, you can refer to the YOLOv8 documentation. |
Beta Was this translation helpful? Give feedback.
-
|
Hello! I'm using yolov8 and I just can't use it from CLI. I have installed ultralytics as below
but everytime when I want to use the yolo command, it appears like this. 'yolo' is not recognized as an internal or external command operable program or batch file |
Beta Was this translation helpful? Give feedback.
-
|
Hello! 👋 Thank you for reaching out. It looks like you're encountering an issue with the Steps to Resolve:
Example Commands:Here are some example commands you can try once the
If the issue persists, please provide more details or any error messages you encounter. This will help us better understand the problem and provide a more accurate solution. Feel free to check out our documentation for more information on using YOLOv8. |
Beta Was this translation helpful? Give feedback.
-
|
Hi everyone, I am using yolov8l-seg.pt model for segmenting my breast cancer MRI 2D images. There are only 2 classes ( 0 for no cancer, 1 for cancer). The data.yaml file looks like this The images are 256X256 RGB and have not been normalized.
Thanks |
Beta Was this translation helpful? Give feedback.
-
|
@SahilMahey the YOLO model will interpret coordinates based on the format specified in your |
Beta Was this translation helpful? Give feedback.
-
|
Hi Thanks for the reply. So the image of the coordinates I shared above is fine and or will it cause any disruption as they are moving to new row? Thanks |
Beta Was this translation helpful? Give feedback.
-
|
The YOLO model will interpret each line as a separate polygon. Ensure that each polygon's coordinates are complete and correctly formatted within a single line to avoid misinterpretation. |
Beta Was this translation helpful? Give feedback.
-
|
Thanks for the help. Can you please provide any source code or resources available to reduce my polygon coordinates or put them in one line? Thanks |
Beta Was this translation helpful? Give feedback.
-
|
You can use libraries like |
Beta Was this translation helpful? Give feedback.
-
|
Hi! |
Beta Was this translation helpful? Give feedback.
-
|
The learning method in YOLOv8 does not inherently retain information from previous datasets when adding new data. To improve learning efficiency, you can merge the datasets and retrain the model on the combined data. This approach ensures the model learns from both old and new data effectively. |
Beta Was this translation helpful? Give feedback.
-
|
I see. So, is this folder structure correct for when I'm training the model? project |
Beta Was this translation helpful? Give feedback.
-
|
@ht22a006 yes, your folder structure looks correct for training with both existing and additional data. Ensure your dataset configuration file points to these directories for training and validation. |
Beta Was this translation helpful? Give feedback.
-
|
I was able to add new data to the dataset and train the model! Thank you! |
Beta Was this translation helpful? Give feedback.
-
|
You're welcome! If you have any more questions or need further assistance, feel free to ask. |
Beta Was this translation helpful? Give feedback.
-
|
Hi YOLO Team, I’ve trained a YOLO model on a custom dataset of 12k images, achieving around 60% accuracy. I recently obtained another custom dataset that contains the same classes as the original dataset which is having 4k images. I’m considering the best approach to improve the model’s performance with this new data. Would you recommend: Fine-tuning the existing model on the new dataset? Thanks, |
Beta Was this translation helpful? Give feedback.
-
|
@rohith-aiunika hi Rohith, For improving your model's performance, fine-tuning the existing model on the new dataset is a good starting point. If results aren't satisfactory, consider merging both datasets and retraining from scratch. This approach can enhance generalization by leveraging the combined data. |
Beta Was this translation helpful? Give feedback.
-
|
Hi YOLO Team, I’ve trained a YOLO model on a custom dataset of 12k images, achieving around 60% accuracy. I recently obtained another custom dataset that contains the same classes as the original dataset which is having 4k images. I’m considering the best approach to improve the model’s performance with this new data. Would you recommend: Fine-tuning the existing model on the new dataset? Thanks, |
Beta Was this translation helpful? Give feedback.
-
|
@rohith-aiunika hi Rohith, For your scenario, fine-tuning the existing model on the new dataset is often a good approach, especially since the classes are the same. This can help improve performance without starting from scratch. To fine-tune, load your existing model and train it further using the new dataset. You can use the |
Beta Was this translation helpful? Give feedback.
-
|
so is it similar as train? |
Beta Was this translation helpful? Give feedback.
-
|
Yes, you can fine-tune by loading your previous model's ` |
Beta Was this translation helpful? Give feedback.
-
|
There are parameters in yolo which you can change to achieve that. Made the freeze = 0 ( this will unfreeze all layers) and if you also interested in not initializing your model with pretrained weights, make pretrained = False. I hope this helps. |
Beta Was this translation helpful? Give feedback.
-
|
@AdySaputra15 you can set the |
Beta Was this translation helpful? Give feedback.
-
|
Here it is |
Beta Was this translation helpful? Give feedback.
-
|
It would be better if you would elaborate on what is your task and how do you like to achieve it. |
Beta Was this translation helpful? Give feedback.
-
|
To train the YOLOv8n-seg model from scratch, you can initialize it with a configuration file instead of a pre-trained weight file. Use the following approach: from ultralytics import YOLO
# Load the YOLOv8 segmentation model from a YAML configuration
model = YOLO('yolov8n-seg.yaml') # Ensure this YAML defines the model architecture
# Train the model from scratch
model.train(data='data.yaml', epochs=20, imgsz=256, batch=32, device='cuda', freeze=0, pretrained=False)This will start training without using any pre-trained weights. For more details, visit the YOLOv8 documentation. |
Beta Was this translation helpful? Give feedback.
-
|
You can find the |
Beta Was this translation helpful? Give feedback.
-
|
Yes, the |
Beta Was this translation helpful? Give feedback.
-
|
@AdySaputra15 you can modify parameters like |
Beta Was this translation helpful? Give feedback.
-
|
You will be able to train from 0 with the things I have mentioned. The freeze = 0and pratrained = False ensure that you train from 0. Thus means the model will not have any weights and you will get to train from scratch. I hope this help. |
Beta Was this translation helpful? Give feedback.
-
|
@SahilMahey to train a YOLOv8 model from scratch, set |
Beta Was this translation helpful? Give feedback.
-
|
How it's possible that, lowering IoU thresholds, model's Recall could increase? With this output Lowering IoU from 0.6 to 0.2 I observe this an increase of Recall. How it's possible? |
Beta Was this translation helpful? Give feedback.
-
|
@GaviraghiElia lowering the IoU threshold increases recall because it allows more detections to be considered true positives, even if they overlap less with the ground truth, thus capturing more potential positives. |
Beta Was this translation helpful? Give feedback.
-
|
@glenn-jocher thanks, I understood this after reading the code but I think it is not so good: NMS IoU threshold and IoU threshold to consider a TP or FP prediction should be two different parameters. Because maybe I want to adjust NMS IoU threshold to eliminate more duplicate bboxes, but I want to evaluate Recall and Precision at IoU = 0.5 to understand which values in NMS work better. |
Beta Was this translation helpful? Give feedback.
-
|
Thank you for your feedback. The IoU threshold for NMS and evaluation can indeed be separated to fine-tune performance metrics like Recall and Precision. This flexibility allows you to optimize detection results by adjusting NMS independently from evaluation criteria. |
Beta Was this translation helpful? Give feedback.
-
|
Ok, but how to do that? How can I set the IoU value for NMS separately from the IoU value used to decide whether a forecast is a TP or FP with Ultraytics library? |
Beta Was this translation helpful? Give feedback.
-
|
Currently, the Ultralytics library does not support setting separate IoU values for NMS and evaluation. This is a known limitation, and we appreciate your feedback. For updates on this feature, please keep an eye on the GitHub repository for future releases. |
Beta Was this translation helpful? Give feedback.
-
|
Hi, I'm using YOLOv8n for training of errors in FDM 3D Priniting (in educational purposes). I wonder how training process works (or if I can check the training script from Ultralitics). The thing is that I want to compare performance on limited number of epochs with and without augmentations. I don't clearly understand the usage of albumentations at the start of training task. Does this augmentation applies on all images while training? If it does, how do I turn it off completely to compare performance? |
Beta Was this translation helpful? Give feedback.
-
|
@NegroAmigo to disable augmentations during training with YOLOv8, you can set the |
Beta Was this translation helpful? Give feedback.
-
|
Hi @glenn-jocher, thank you for your answer. I have disabled augment parameter, but metrcis in evaluation are pretty the same as if YOLO has been trained with default augmentation. Could this be effected by close mosaic? Or I can make conclusion that augmentations doesn't affect overall performance so much? |
Beta Was this translation helpful? Give feedback.
-
|
It's possible that the close mosaic augmentation is still affecting your results. To ensure all augmentations are disabled, you can set |
Beta Was this translation helpful? Give feedback.
-
|
Hello @glenn-jocher, I've downloaded source code from Ultralitics GitHub. Since You've adviced me to use augment=False, my evaluation figures changed a bit (but I was still thinking that it's due to random nature of model's weights). I've opened the default.yaml and found that parameter augment is used for Predict settings. Does this mean that augmentations were disabled only for predictions? Maybe you can give me a contact of your colleague who can provide deeper explanation on customizing YOLOv8 parameters? Thanks. |
Beta Was this translation helpful? Give feedback.
-
|
The |
Beta Was this translation helpful? Give feedback.
-
|
Dear Ultralytics team, I am writing thesis and there is a part regarding to Pose estimation models, which I want to introduce the YOLOv8-Pose family, I wonder if you still have the image illustrates the YOLOv8-Pose family like this image https://pyimagesearch.com/wp-content/uploads/2023/05/yolov8-model-comparison.png |
{kind=link}
Beta Was this translation helpful? Give feedback.
-
|
@ducanh-ho2296 thank you for your interest in the YOLOv8-Pose models. Unfortunately, we don't have the specific image you mentioned. For the latest resources and visualizations, please refer to our GitHub repository and documentation. |
Beta Was this translation helpful? Give feedback.
-
|
Hi, I wanted to know if I can perform an object detection and segmentation (of a specific class)and make inferences in the same video. |
Beta Was this translation helpful? Give feedback.
-
|
To perform both object detection and segmentation in the same video, you'll need to re-train using the 'yolov8n-seg' model to cover the segmentation task. This will ensure that your model can handle both tasks effectively. |
Beta Was this translation helpful? Give feedback.
-
|
Hi, If I train a model, it can recognize a variety of targets, just like the trained model you provided, which can recognize 80 types of targets. Now I only want to recognize a few targets in a photo instead of all targets. , so how do I write the code? |
Beta Was this translation helpful? Give feedback.
-
|
@dagongge to address your questions about selective detection and using multiple models:
from ultralytics import YOLO
model = YOLO('yolov8n.pt')
results = model(source='image.jpg', classes=[0, 2]) # Only detect person (0) and car (2)
model1 = YOLO('yolov8n.pt') # Pre-trained model
model2 = YOLO('path/to/custom.pt') # Your custom model
# Run both models
results1 = model1('image.jpg')
results2 = model2('image.jpg')
# Process and visualize results from both models on the same image
for r in results1 + results2:
r.plot()For more details on customizing predictions, please see our Predict documentation page. |
Beta Was this translation helpful? Give feedback.
-
|
ok,thank you very much! |
Beta Was this translation helpful? Give feedback.
-
|
@dagongge you're welcome! If you have any more questions or need further assistance with Ultralytics YOLO models, feel free to reach out. The community and the Ultralytics team are always here to help! |
Beta Was this translation helpful? Give feedback.
-
|
If the model performs well and you are happy with it, you can filter by class:
or multiple classes you want: or like this: |
Beta Was this translation helpful? Give feedback.
-
|
@johnlockejrr thanks for sharing your code example. For better performance and readability, you can also filter detections directly during prediction using the results = model.predict(source='path/to/image.jpg', conf=0.25, classes=[0, 2, 3])This filters low-confidence detections and specific classes in a single step, which is more efficient than post-processing the results. For more details on prediction options, see https://docs.ultralytics.com/modes/predict/. |
Beta Was this translation helpful? Give feedback.
-
|
great!thank you! |
Beta Was this translation helpful? Give feedback.
-
|
Thank you for your feedback! If you have any more questions or need further assistance, feel free to reach out. The YOLO community and Ultralytics team are always here to help! |
Beta Was this translation helpful? Give feedback.
-
|
How does YOLO object tracking identify the same object across different frames? |
Beta Was this translation helpful? Give feedback.
-
|
@rohith-aiunika yOLO object tracking links detections across frames by combining motion-based techniques (e.g., Kalman filtering), object appearance features, and associating consecutive detections using algorithms like Hungarian matching. This ensures consistent tracking IDs for objects over time. For more details, refer to the Track Mode documentation. |
Beta Was this translation helpful? Give feedback.
-
|
The same object in the sequence is being assigned different IDs across frames. For instance, in frame 266, the object has an ID of 208, but in frame 270, it is assigned a different ID. |
Beta Was this translation helpful? Give feedback.
-
|
Consistency in IDs across frames is typically handled by tracking algorithms, such as DeepSORT, which combine object detections with appearance and motion information. In this case, inconsistent IDs may occur due to lost detections or occlusions. Ensuring robust detections and tuning tracker parameters (e.g., IoU threshold or motion model configurations) should help resolve this. Refer to the Track mode documentation for further guidance. |
Beta Was this translation helpful? Give feedback.
-
|
can i use my yolo custom segmentation model to inference and use deepsort algorithm to track my objects? |
Beta Was this translation helpful? Give feedback.
-
|
@rohith-aiunika yes, you can use your YOLO custom segmentation model for inference and integrate it with DeepSORT to track objects across frames. Load your model for predictions and feed the detections (bounding boxes, confidence, and class) to DeepSORT for tracking. Refer to the Track mode documentation for additional guidance. |
Beta Was this translation helpful? Give feedback.
-
|
Hi, I can see the GFLOPs of yolov8 series and yolo11 series. Is that the GFLOPs during training? If it is true, so what is the GFLOPs of these models during inference? |
Beta Was this translation helpful? Give feedback.
-
|
@JackEdoubleS the GFLOPs listed for the models are typically for inference, not training, as inference metrics are more relevant for real-world deployments. You can refer to the Performance Metrics in the documentation for detailed values, including FLOPs during inference. Let me know if you need further clarification! |
Beta Was this translation helpful? Give feedback.
-
|
I would like to know what the GFLOPs of each model is. How can I do it? |
Beta Was this translation helpful? Give feedback.
-
|
@JackEdoubleS to determine the GFLOPs of a model, you can run |
Beta Was this translation helpful? Give feedback.
-
models/yolov8/
Explore the thrilling features of YOLOv8, the latest version of our real-time object detector! Learn how advanced architectures, pre-trained models and optimal balance between accuracy & speed make YOLOv8 the perfect choice for your object detection tasks.
https://docs.ultralytics.com/models/yolov8/
Beta Was this translation helpful? Give feedback.
All reactions